Beschreibung
Der Rahmen wird aus Aluminiumprofil 20x20mm B-Typ NUT 6 aufgebaut.
Bauraum: 200x200x150mm
Stückliste

| Bild | Menge | Beschreibung |
 |
4 Stk. | X-Achse Aluprofil 20x20mm Länge 340mm |
| 4 Stk. | Y-Achse Aluprofil 20x20mm Länge 303mm |
|
| 4 Stk. | Z-Achse Aluprofil 20x20mm Länge 350mm |
|
| 2 Stk. | Druckbettauflage Aluprofil 20x20mm Länge 285mm |
|
| 1 Stk. | Druckbettauflage Aluprofil 20x20mm Länge 135mm |
|
| 48 Stk. | Schraube M4x8mm | |
| 48 Stk. | Gewindeplatte M4 | |
| 24 Stk. | Winkel 20 B-Typ |
Aufbau Rahmen
Der Rahmen muss winklig aufgebaut sein !!!
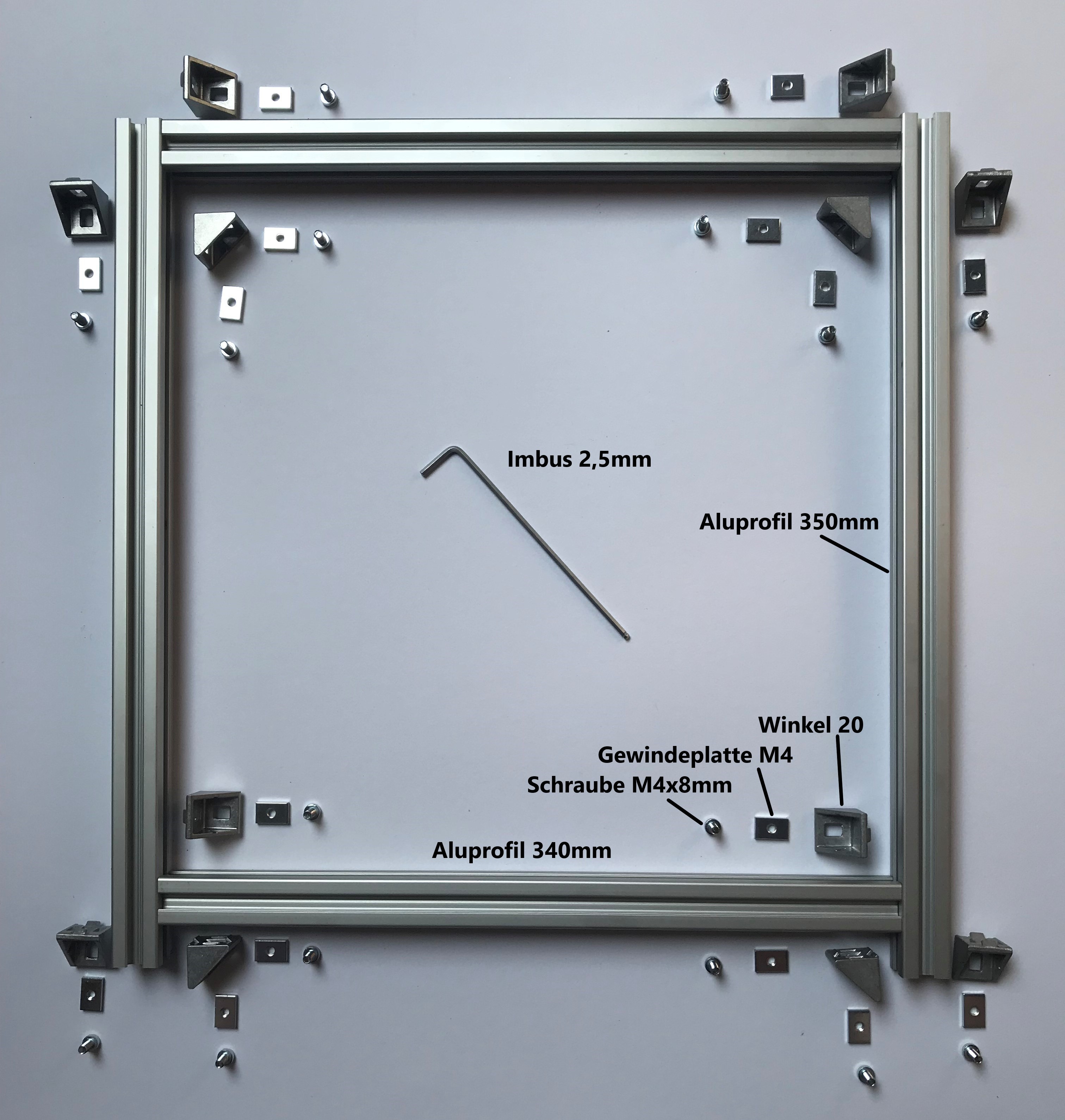
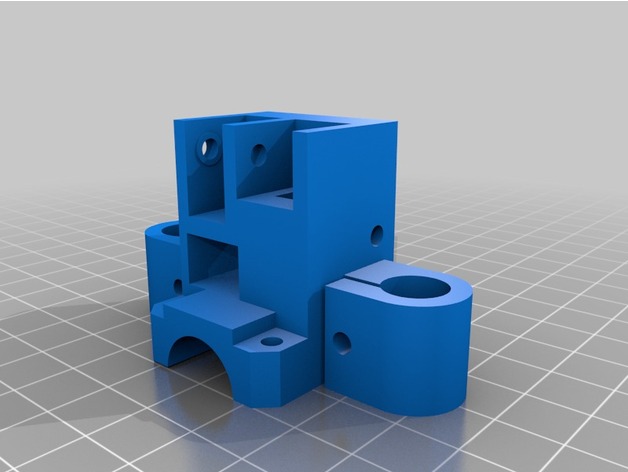
Die Teile die für den Zusammenbau des hinteren Rahmens benötigt werden.

Die linke obere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

Die linke, obere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

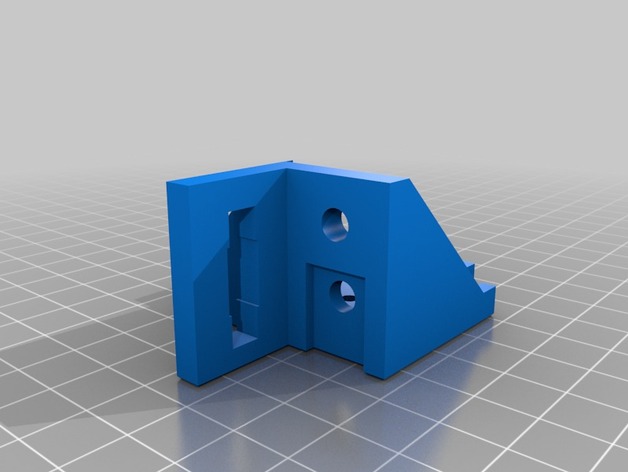
Die linke, untere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

Die linke, untere Ecke. Die rechte Ecke wird spiegelbildlich aufgebaut.

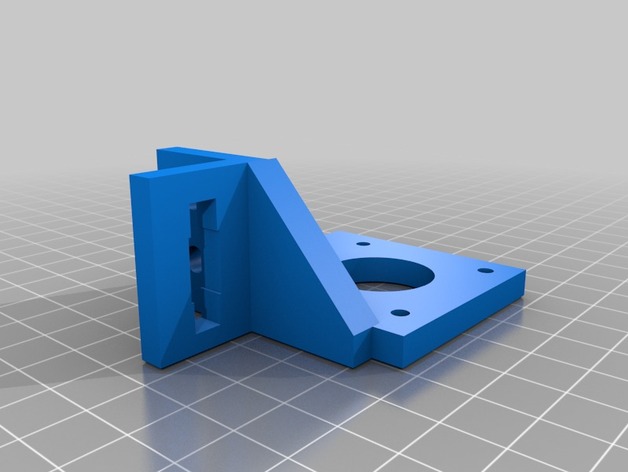
Hinterer Rahmen, der vordere wird gleich aufgebaut. Das auf dem Bild gezeigte Teil wird also zwei mal benötigt.
Aufbau Druckbettauflage
Muss winklig sein !!!