Eigenschaften
Methoden / Funktionen
| 1. | void clearWatch(long watchId); | |
| 2. | getCurrentPosition(zeigePosition [[, zeigeFehler], Optionen]) | aktuellen Standort abfragen |
| 3. | watchPosition(zeigePosition, [[zeigeFehler], Optionen]) | Positionsverfolgung |
Scriptbeispiel zu Methode 2
function Position(){
Optionen = {
enableHighAccuracy: false,
timeout: 5000,
maximumAge: 0
};
navigator.geolocation.getCurrentPosition(zeigePosition, zeigeFehler, Optionen);
}
Eigenschaften die die Methoden 2. und 3. liefern
| coords.latitude | Breitenangabe als Dezimalzahl |
| coords.longitude | Längenangabe als Dezimalzahl |
| coords.accuracy | Genauigkeit der Koordinaten (in Meter) |
| coords.altitude | Höhenangabe (über dem Meeresspiegel) |
| coords.altitudeAccuracy | Genauigkeit der Höhenangabe |
| coords.heading | Richtung |
| coords.speed | Geschwindigkeit (in m/s) |
| timestamp | Zeit der Positionsangabe |
Scriptbeispiel zum Callback „zeigePosition“ aus Methode 2
function zeigePosition(Position){
var Latitude = Position.coords.latitude;
var Longitude = Position.coords.longitude;
text = "Latitude = " + Latitude + '<br>' +
"Longitude = " + Longitude + '<br>';
var ausgabe = document.getElementById('ausgabe');
ausgabe.innerHTML = text;
}
Optionen für die Methoden 2. und 3.
| enableHighAccuracy | false | |
| timeout | 0xFFFFFFFF | |
| maximumAge | 0 |
Verfügbarkeit prüfen:
if (navigator.geolocation) {
alert("navigator.geolocation verfügbar");
}
Links
W3C Geolocation API Specification
selfhtml JavaScript/Geolocation
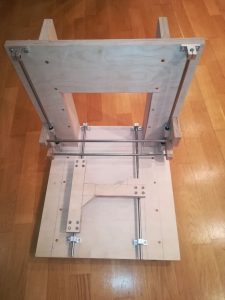 Die X-Achse, die Halterungen für die Z-Achse so wie die Linearwellen für die Z-Achse sind montiert.
Die X-Achse, die Halterungen für die Z-Achse so wie die Linearwellen für die Z-Achse sind montiert.



 Der Grundrahmen mit der Druckbetthalterung und der Linearführung für die Y-Achse ist fertig aufgebaut.
Der Grundrahmen mit der Druckbetthalterung und der Linearführung für die Y-Achse ist fertig aufgebaut.





 Mounted ball bearing:
Mounted ball bearing: